WP3-15 2: Difference between revisions
| (8 intermediate revisions by 2 users not shown) | |||
| Line 18: | Line 18: | ||
|- | |- | ||
| TRL || 5 | | TRL || 5 | ||
|- | |||
| Contact || fernando.herrera at acorde.com | |||
|} | |} | ||
| Line 27: | Line 29: | ||
==Detailed Description== | ==Detailed Description== | ||
GLAD+ is | GLAD+ is a significantly improved version of its predecessor GLAD (GNSS-based Low-Cost position and Attitude Determination system). | ||
It is specifically oriented to provide drones quality navigation information (position, velocity and attitude) at a reduced cost in challenged outdoor scenarios. Drone scenarios expose position/attitude estimation systems to challenging conditions (e.g., shadows, more challenging dynamics than land-vehicles, calibration constraints), and stringent cost, size and weight requirements. As GLAD, GLAD+ is a “complete” solution from ACORDE, in the sense that ACORDE performs both application and platform design and development (including a COTS based HW design). | It is specifically oriented to provide drones quality navigation information (position, velocity and attitude) at a reduced cost in challenged outdoor scenarios. Drone scenarios expose position/attitude estimation systems to challenging conditions (e.g., shadows, more challenging dynamics than land-vehicles, calibration constraints), and stringent cost, size and weight requirements. As GLAD, GLAD+ is a “complete” solution from ACORDE, in the sense that ACORDE performs both application and platform design and development (including a COTS based HW design). | ||
| Line 33: | Line 35: | ||
File:ACO_GLAD_PLUS.png|thumb|800px|center|alt=ACORDE GLAD+ component| Enhancements performed to the ACORDE GLAD system in COMP4DRONES (click on them for more information) | File:ACO_GLAD_PLUS.png|thumb|800px|center|alt=ACORDE GLAD+ component| Enhancements performed to the ACORDE GLAD system in COMP4DRONES (click on them for more information) | ||
rect 512 402 1443 519 [[WP4-16]] | rect 512 402 1443 519 [[WP4-16]] | ||
rect 522 657 1449 763 [[WP5- | rect 522 657 1449 763 [[WP5-11_ACO]] | ||
</imagemap> | </imagemap> | ||
The above figure sums up the contributions and improvements in GLAD+ | The above figure sums up the contributions and improvements in GLAD+, enabled by ACORDE activity in COMP4DRONES, taking GLAD as a baseline: | ||
* The design of and improved HW/SW platform for the navigation solutions (WP3-15_1). It includes a new HW platform with improved capabilities on GNSS receivers, and also the assessment of license-free real-time RTOS on top. | * The design of and improved HW/SW platform for the navigation solutions (WP3-15_1). It includes a new HW platform with improved capabilities on GNSS receivers, and also the assessment of license-free real-time RTOS on top. | ||
* Enhancement of the navigation software, for adapting it to the new platform and to apply algorithmic improvements, including the assessment of possible AI based improvements ([[WP4-16]]). | * Enhancement of the navigation software, for adapting it to the new platform and to apply algorithmic improvements, including the assessment of possible AI based improvements ([[WP4-16]]). | ||
* Providing support of anti-jamming and anti-spoofing features ([[WP5- | * Providing support of anti-jamming and anti-spoofing features ([[WP5-11_ACO]]). | ||
* Providing an improved/extended interface for a smoother integration on drone systems (activity globally associated to WP3, with implications in WP4 and WP5). | * Providing an improved/extended interface for a smoother integration on drone systems (activity globally associated to WP3, with implications in WP4 and WP5). | ||
| Line 48: | Line 50: | ||
In addition to a significant upgrade of its positioning products, in COMP4DRONES ACORDE is also aiming the improvement of its productivity on the modelling, design, implementation and validation procedures of these type of systems [[WP6-ESDE]]. | In addition to a significant upgrade of its positioning products, in COMP4DRONES ACORDE is also aiming the improvement of its productivity on the modelling, design, implementation and validation procedures of these type of systems [[WP6-ESDE]]. | ||
== | ==Status after C4D== | ||
So far, ACORDE has advanced in parallel in all the afore mentioned tasks. The current advance can be summarized as follows: | So far, ACORDE has advanced in parallel in all the afore mentioned tasks. The current advance can be summarized as follows: | ||
| Line 84: | Line 86: | ||
==Design and Implementation== | ==Design and Implementation== | ||
As well as the significant improvements | As well as the significant improvements in low-cost position and attitude estimation i.e., GLAD+, in COMP4DRONES, ACORDE has progressed towards a qualitative enhancement of its design procedures. See more details in [[WP6-ESDE]]. | ||
[[ | |||
Latest revision as of 12:33, 14 March 2023
Geo-referenced Position and Attitude Estimation
| ID | WP3-15_2 |
| Contributor | ACORDE |
| Levels | Platform, Function |
| Require | Energy, Raw sensed data navigation messages of GNSS receivers, raw data from low-cost IMU and barometer |
| Provide | Navigation Sensor |
| Input | Raw sensed data from GNSS receivers, low-cost INS and barometer |
| Output | Position, Attitude and Velocity |
| C4D building block | Geo-referenced Position and Attitude Estimation System |
| TRL | 5 |
| Contact | fernando.herrera at acorde.com |
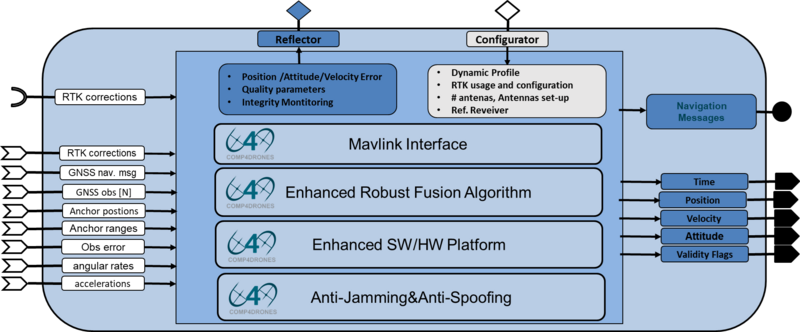
In COMP4DRONES, ACORDE is developing GLAD+, and outdoor geo-referencing system which abides to the “Geo-referenced Positioning and Attitude estimation system” block introduced in the COMP4DRONES architecture introduced, whose representation is reproduced in the following figure.

GLAD+ is The following figure shows a number of crucial enhancements tackled in COMP4DRONES .
Detailed Description
GLAD+ is a significantly improved version of its predecessor GLAD (GNSS-based Low-Cost position and Attitude Determination system).
It is specifically oriented to provide drones quality navigation information (position, velocity and attitude) at a reduced cost in challenged outdoor scenarios. Drone scenarios expose position/attitude estimation systems to challenging conditions (e.g., shadows, more challenging dynamics than land-vehicles, calibration constraints), and stringent cost, size and weight requirements. As GLAD, GLAD+ is a “complete” solution from ACORDE, in the sense that ACORDE performs both application and platform design and development (including a COTS based HW design).
{kind=link}
The above figure sums up the contributions and improvements in GLAD+, enabled by ACORDE activity in COMP4DRONES, taking GLAD as a baseline:
- The design of and improved HW/SW platform for the navigation solutions (WP3-15_1). It includes a new HW platform with improved capabilities on GNSS receivers, and also the assessment of license-free real-time RTOS on top.
- Enhancement of the navigation software, for adapting it to the new platform and to apply algorithmic improvements, including the assessment of possible AI based improvements (WP4-16).
- Providing support of anti-jamming and anti-spoofing features (WP5-11_ACO).
- Providing an improved/extended interface for a smoother integration on drone systems (activity globally associated to WP3, with implications in WP4 and WP5).
This page gives mostly details on the overal GLAD+ system, and on its SW/HW platform. More details on other improvements also reachable by clicking the links to them (also on the clickable figure).
In addition to a significant upgrade of its positioning products, in COMP4DRONES ACORDE is also aiming the improvement of its productivity on the modelling, design, implementation and validation procedures of these type of systems WP6-ESDE.
Status after C4D
So far, ACORDE has advanced in parallel in all the afore mentioned tasks. The current advance can be summarized as follows:
- The new HW platform for GLAD+ has been designed and implemented (shown in Figure 66a). The new HW platform includes new low-cost GNSS receivers, with multi-constellation and anti-jamming and anti-spoofing capabilities.
- A custom Linux Real-Time port for the GLAD+ HW platform has been developed. This port relies on an updated u-boot, on buildroot-2020.02-LTS (generating a filesystem to be loaded as ramdisk), and on kernel-rt-4.19.59 (includes RT-PREEMT patch).
- In past GLAD development, a platform abstraction layer was developed in order to separate platform dependent code (e.g., threads creation, interruption management, POSIX calls, call to drivers). This layer has been already updated to cover RT-Linux target.
- A preliminary version of the driver for making available jamming and spoofing events has been already developed and tested.
- A logger system has been updated and sent together the GLAD+ HW/SW platform ACORDE to the drone integrator in construction use case (UC2-demo1). ACORDE generated documentation for integration and supported the integrator in what resulted a smooth and quick integration.
- The integrator performed flight tests. ACORDE supported the integrator with additional documentation (i.e., for operation and tests of the integration, and for indicating specific maneuvers to let validation tests cover as many working conditions as possible).
- With that information, ACORDE has done some preliminary evaluation of the current algorithms, and tested the potential of some improvements, i.e.., multi-constellation support. Algorithmic improvement is in progress.

Contribution and Improvements
GLAD+ is expected to bring important improvements or contributions that can be summarized as follows:
- More interoperability, given by the support of a Mavlink interface for providing the position estimates.
- Security features, enabled by the anti-jamming and anti-spoofing capabilities
- Lesser cost, a validated Linux-based port implementation means an important license cost saving with regard GLAD implementation.
- Better performance (higher resilience, precision, and integrity) of the positioning solution (including attitude).
- A proposal of smooth Mavlink extension to provide all attitude components, and to report jamming and spoofing events.
In addition to the own improvements associated to GLAD+, ACORDE has gained useful knowhow for smoothly targeting fusion algorithms to different low-cost COTS receivers. This enables ACORDE to provide low-cost positioning solutions with less dependency on COTS suppliers, of great importance as show by the COVID related lock down.
Figure below shows the boot of the custom RT Linux distribution developed by ACORDE for GLAD+ platform. As can be seen, the kernel boots in little bit more 3 seconds (time labels are relative to kernel start). Taking into account the bootloader (not shown in the capture) took around4-5s, it leads to ~8s for booting the position&attitude estimation application (actually, the boot process goes on to get Ethernet link ready and launching SSH services, however, they are used for configuration or debugging, and the position&attitude application is launched before triggering). Further tests were conducted. Different resolution timers (from 100 to 1000 Hz) were tested. Moreover, the latencies of the scheduler (context switches) were estimated under heavy workload conditions, relying on the “cyclictest” [31] and “hackbench” [32] standard Linux utilities. An average latency 41 us, with 72 us maximum latency was obtained. This is a key figure for tick timer setting. For instance, 20 context-switches per second would take 1.4ms max. overhead, and less than 1ms on average, which seems affordable for GLAD+ application margins. Further study with final GLAD+ firmware is still required though.

Figure b) above shows the results of some preliminary analysis enabled by the data log from the integration tests of Dec. 2020. That test was performed in static conditions in front of the facilities of the integrator (FADA-CATEC). Specifically, Figure 67b) shows three stacked graphics with the three components of a “tail-head” baseline estimation, fundamental pre-processing for attitude estimation (heading and pitch components can be directly derived via a simple formula). The top one is a non-causal estimate, and thus only possible after offline post-processing, which is taken as a ground truth reference. Green colors reflect convergence of the ambiguity resolution algorithms (and thus resembles a precise estimate), while orange reflect no-convergence, and thus no-valid, in general, inaccurate estimate. The bottom graphic shows a “forward” (i.e., that can be computed in real-time) estimate of the baseline using only GPS constellation. As can be seen, most of the capture (97.9%) lacks convergence. The problem is related to the buildings around the drone at the capture time, which shadowed several satellites of the GPS constellation. The graphic on the middle, shows a forward estimate of the baseline using both GPS and Galileo constellations, as enabled by the GLAD+ HW/SW platform. This estimate gets the same 97.7% figure, but of convergence time, indeed very close to the 98.3% time achieved with non-causal processing.
Design and Implementation
As well as the significant improvements in low-cost position and attitude estimation i.e., GLAD+, in COMP4DRONES, ACORDE has progressed towards a qualitative enhancement of its design procedures. See more details in WP6-ESDE.