WP4-36: Difference between revisions
Jump to navigation
Jump to search
(Created page with "=Autonomous Decision Making in Critical Situations = {|class="wikitable" | ID|| WP4-36 |- | Contributor || IMCS |- | Levels || Function |- | Require || TBC |- | Provide || TBC |- | Input || TBC |- | Output || TBC |- | C4D building block || TBC |- | TRL || TBC |} ==Detailed Description== TBC ==Specifications and contribution== TBC ==Design and Implementation== TBC ==Reference== TBC") |
|||
| (2 intermediate revisions by one other user not shown) | |||
| Line 7: | Line 7: | ||
| Levels || Function | | Levels || Function | ||
|- | |- | ||
| Require || | | Require || drone with on-board computer with ROS interface for Control | ||
|- | |- | ||
| Provide || TBC | | Provide || TBC | ||
|- | |- | ||
| Input || | | Input || from drone - Autopilot, GPS, Remote Control | ||
|- | |- | ||
| Output || | | Output || enumeration for Action if Critical Situation detected | ||
|- | |- | ||
| C4D building block || TBC | | C4D building block || TBC | ||
|- | |- | ||
| TRL || | | TRL || 6 | ||
|- | |||
| Contact || ugis at adsl.lv | |||
|} | |} | ||
== | == Motivation == | ||
* Monitoring of Critical Situations and actions on them must be safe for fully autonomous use, without a human in the loop. | |||
* The above is not the case with most of today’s off-the-shelf drone platforms: | |||
** Although typically drones do monitor some Critical Situations, such monitoring and reactions are designed for cases, where external remote control is available. | |||
** As an example, on detecting a Critical Situation “Remote Control lost”, typically off-the-shelf drones implement reactions Land, Return Home, and Hover. Neither of these options allow to productively continue the mission, which is unacceptable for applications requiring fully autonomous operation. | |||
* The component WP4-36 implements the capability of fully autonomous decision making and execution in situations, where remote control is not available. | |||
== Overview == | |||
* WP4-36 augments drone’s native critical situation handling, thus adding the ability to safely operate in a fully autonomous mode. | |||
* WP4-36 supports operation in the “Human In the Loop” mode, with a Remote Control | |||
* WP4-36 implements: | |||
** additional Critical Situation Monitors | |||
** additional Actions on Critical Situations | |||
** additional configuration mechanism supporting two operation profiles: | |||
*** for externally controlled flight with the Remote Control active | |||
*** for autonomous flight without Remote Control | |||
* WP4-36 enables adaptation of existing drone equipment to changing requirements. Enhancements are easily deployable by means of a software update | |||
* Running as a dedicated ROS node. | |||
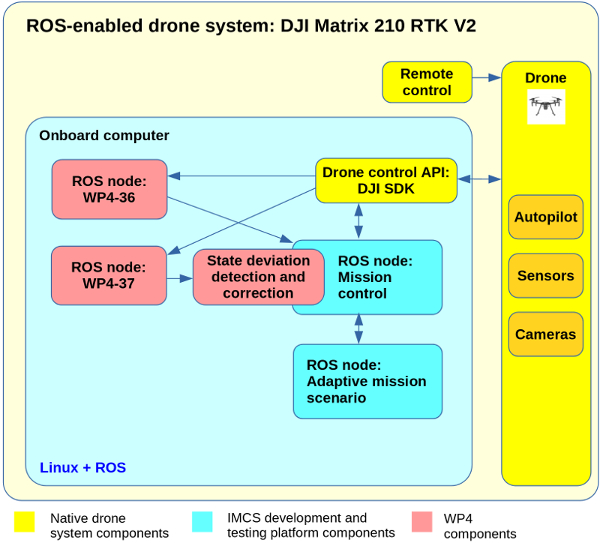
[[File:WP4-36_Overview_600.jpg|frame|center|Computer Vision Component in the application scenario]] | |||
== | == Testing == | ||
* Drone with Autopilot, Sensors, and Cameras | |||
* Remote Control with a computer running GUI and manual pilot application | |||
* Onboard computer on the drone, running Drone control API | |||
* Simulation computer running “DJI Assistant” application, used for fault injection | |||
* Simulation computer with Matlab Simulink environment, running Mission Control and WP4 components | |||
* Simulation computer with Matlab Simulink environment, running Mission scenario component | |||
<gallery widths=600px heights=470px perrow=2> | |||
File:WP4-36_Testing_1_600.png | |||
File:WP4-36_Testing_2_600.png | |||
</gallery> | |||
Latest revision as of 08:44, 10 March 2023
Autonomous Decision Making in Critical Situations
| ID | WP4-36 |
| Contributor | IMCS |
| Levels | Function |
| Require | drone with on-board computer with ROS interface for Control |
| Provide | TBC |
| Input | from drone - Autopilot, GPS, Remote Control |
| Output | enumeration for Action if Critical Situation detected |
| C4D building block | TBC |
| TRL | 6 |
| Contact | ugis at adsl.lv |
Motivation
- Monitoring of Critical Situations and actions on them must be safe for fully autonomous use, without a human in the loop.
- The above is not the case with most of today’s off-the-shelf drone platforms:
- Although typically drones do monitor some Critical Situations, such monitoring and reactions are designed for cases, where external remote control is available.
- As an example, on detecting a Critical Situation “Remote Control lost”, typically off-the-shelf drones implement reactions Land, Return Home, and Hover. Neither of these options allow to productively continue the mission, which is unacceptable for applications requiring fully autonomous operation.
- The component WP4-36 implements the capability of fully autonomous decision making and execution in situations, where remote control is not available.
Overview
- WP4-36 augments drone’s native critical situation handling, thus adding the ability to safely operate in a fully autonomous mode.
- WP4-36 supports operation in the “Human In the Loop” mode, with a Remote Control
- WP4-36 implements:
- additional Critical Situation Monitors
- additional Actions on Critical Situations
- additional configuration mechanism supporting two operation profiles:
- for externally controlled flight with the Remote Control active
- for autonomous flight without Remote Control
- WP4-36 enables adaptation of existing drone equipment to changing requirements. Enhancements are easily deployable by means of a software update
- Running as a dedicated ROS node.

Computer Vision Component in the application scenario
Testing
- Drone with Autopilot, Sensors, and Cameras
- Remote Control with a computer running GUI and manual pilot application
- Onboard computer on the drone, running Drone control API
- Simulation computer running “DJI Assistant” application, used for fault injection
- Simulation computer with Matlab Simulink environment, running Mission Control and WP4 components
- Simulation computer with Matlab Simulink environment, running Mission scenario component

