WP5-11 ACO: Difference between revisions
Jump to navigation
Jump to search
(→How) |
(→How) |
||
| Line 41: | Line 41: | ||
Figure below sums up these actions: | Figure below sums up these actions: | ||
[[File:wp5_11_01.png|frame|center| | [[File:wp5_11_01.png|frame|center|50px|Activities on HW/SW platform levels and user API for anti-jamming and anti-spoofing support in GLAD+]] | ||
==Evaluation== | ==Evaluation== | ||
TBC | TBC | ||
Revision as of 11:41, 10 March 2023
| ID | WP5-11-ACO |
| Contributor | ACORDE |
| Levels | Platform, Function |
| Require | GLAD+ platform WP3-15_2 |
| Provide | Navigation data (position, attitude, velocity) |
| Input | Specific messages from underlying GNSS receivers. |
| Output | Jamming and spoofing detection via the user API and Mavlink API |
| C4D building block | (see WP3-15_2 ) |
| TRL | 4 |
| Parent Building block | WP3-15_2 |
| Contact | fernando.herrera@acorde.com |
Description
One activity of ACORDE in WP5 of COMP4DRONES has been to enable anti-jamming and anti-spoofing capabilities to its low-cost geo-referenced outdoor positioning and attituded estimation solution, i.e. GLAD+ WP3-15_2.
The challenge tackled has been to enable such a feature in a way that:
- hold the low-cost of the solution
- enabled a smooth integration
How
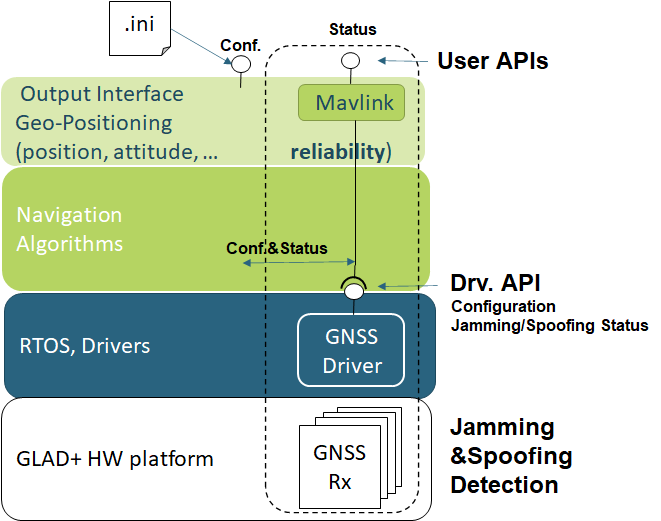
ACORDE has achieved this by tackling the following actions:
- designing and implementing a novel hardware platform that integrates low-cost GNSS receivers with anti-jamming and anti-spoofing capabilities
- at the SW platform level, specific drivers have been developed which enable the positioning application to configure the detection and detect both spoofing and jamming events.
- application-level API has been also enabled. Moreover, a Mavlink semantic extension has been proposed to enable a Mavlink base integration able to transfer spoofing/jamming event information.
Figure below sums up these actions:

Activities on HW/SW platform levels and user API for anti-jamming and anti-spoofing support in GLAD+
Evaluation
TBC