WP4-17
Anchor&Tag firmware of the Indoor Positioning System
| ID | WP4-17 |
| Contributor | ACORDE |
| Levels | Function |
| Require | Indoor Positioning System anchor and tag platforms WP3-15_1 |
| Provide | Navigation data (position) |
| Input | Raw sensed data from UWB transceiver. RTK enabled positioning out of the tunnel. INS data (on the tag). |
| Output | Position |
| C4D building block | |
| TRL | 4 |
| Parent Building block | WP3-15_1 |
| Contact | fernando.herrera at acorde.com |
This page introduced the software developed for Indoor Positioning solution developed by ACORDE in COMP4DRONES. It includes tag and anchor firmware (application and other underlying levels).
Description
The following figure shows the several software layers present on top of the HW anchor&tag devices of the ACORDE Indoor Positioning Solution (IPS) addressed.
The development of the ACORDE IPS has required actions and developments on all these layers. Some of these layers have been tackled on other project WPs:
- BSP set up (in WP3)-15-1, which includes drivers and RTOS adaptation/configuration
- Medium Access Control protocol (in WP5-19_ACO), where acorde has made specific innovation.
The higher software levels of the soltions have been addressed in the context of the WP4 of COMP4RDRONES, as described in the figure.

The layers addressed are:
- Upper application layers, in charge of I/O interfacing (e.g. support of Mavlink API) and configuration.
- geo-positioning, which includes geo-positioning via trilateration and fusion techniques in general
- ranging, in charge of computation of ranges derived from the time metrics derived from UWB message exchages
Contributions
The efforts invested in WP4 for the uppers layers of the ACORDE IPS solution have been fruitful in the afore introduced layers.
They can be sum up as follows:
- A first version of CCM in place
- Selection and implementation of development of a TWR ranging scheme
- Development of two versions of positioning algorithms
- Service for local and remote control, configuration and monitoring (CCM)
Validation
The following figure provides an example where ACORDE validated the possibility to remotely configure, control and monitor the node.

In first place, a show command is issued to read the node status (monitoring). Then the position of the UWB anchor is manually configured, and then the node is reseted to ensure new configuration is applied (monitoring and control). Finally, a new show command is issued to check the effectivity of the CCM sequence.
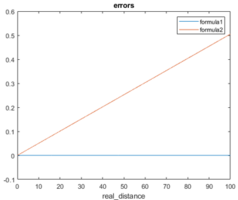
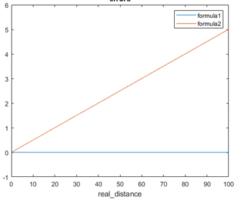
(TBC: comments on positioning algorithms, on ranging scheme)

fi=0, fr=0, treply=0